ゴキブリを制御しユビキタスなインターフェースへ「Calmbots」筑波大学 デジタルネイチャー推進戦略研究基盤



本技術「Calmbots」は、生物の持つモビリティ性、自己メンテナンス性、潜伏能力などの特性を生かした新しいインターフェースです。複数のゴキブリを電気刺激で制御することで、彼らをピクセルに見立てディスプレイとして用いたり、物体を運搬したり、ペンを持たせ線を書くことができます。さらには、触覚インターフェース、入力インターフェース、オーディオデバイスとしての可能性を秘めています。
ゴキブリは我々の生活空間に入り込み、我々からは見えないところで生活しています。しかし、彼らが存在することを我々はしばしば認識します。これは、我々が「ユビキタスコンピューティング」と呼ぶ概念の性質と似ています。「意識的ではないが、確かに存在し、ときに現れる機能」とも言えるからです。彼らをコントロール下に置くことで、彼らはグリム童話の「小人の靴屋」のように、我々の目に触れずにゴミを片付けたり、物の位置を直してくれたりします。仕事が終わると彼らは勝手に見えないところに隠れ彼らの生活に戻ります。彼らをユビキタスコンピューティング上のロボティクスと考えることは、ユビキタスなテクノロジーを考える上で十分な示唆を与えてくれるでしょう。
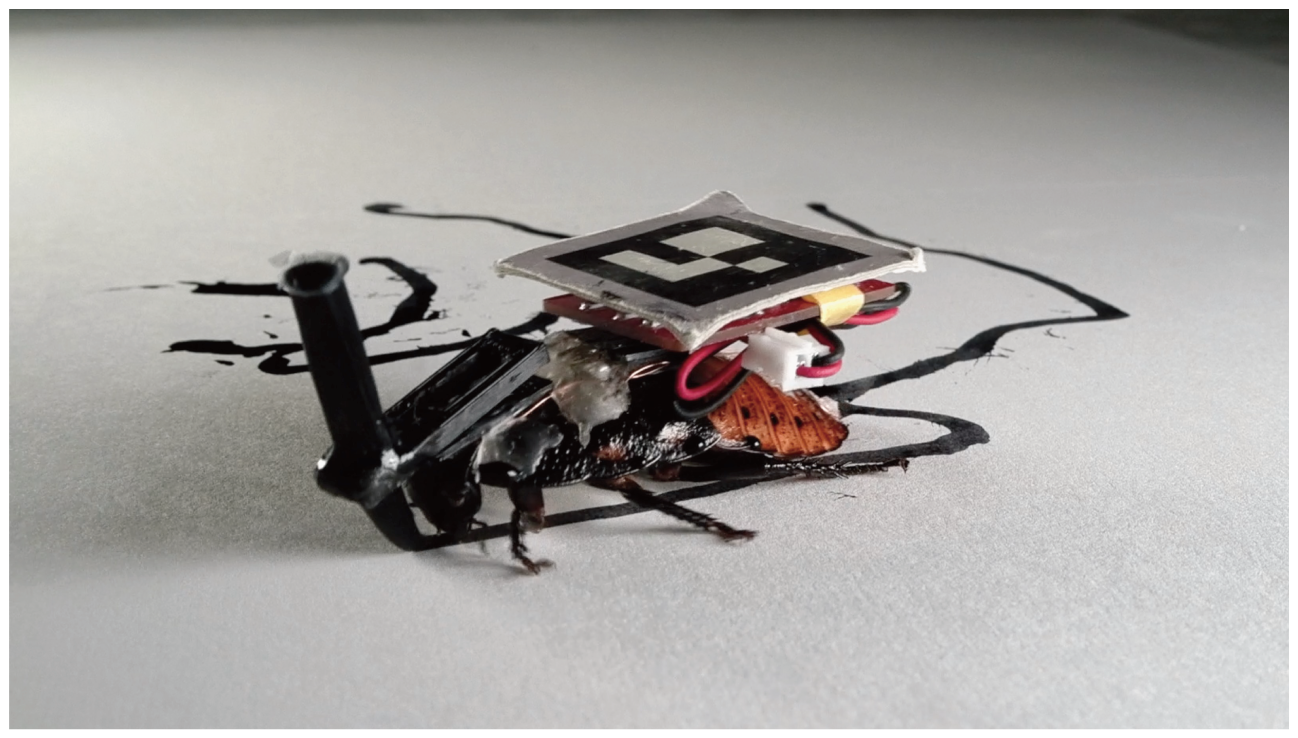
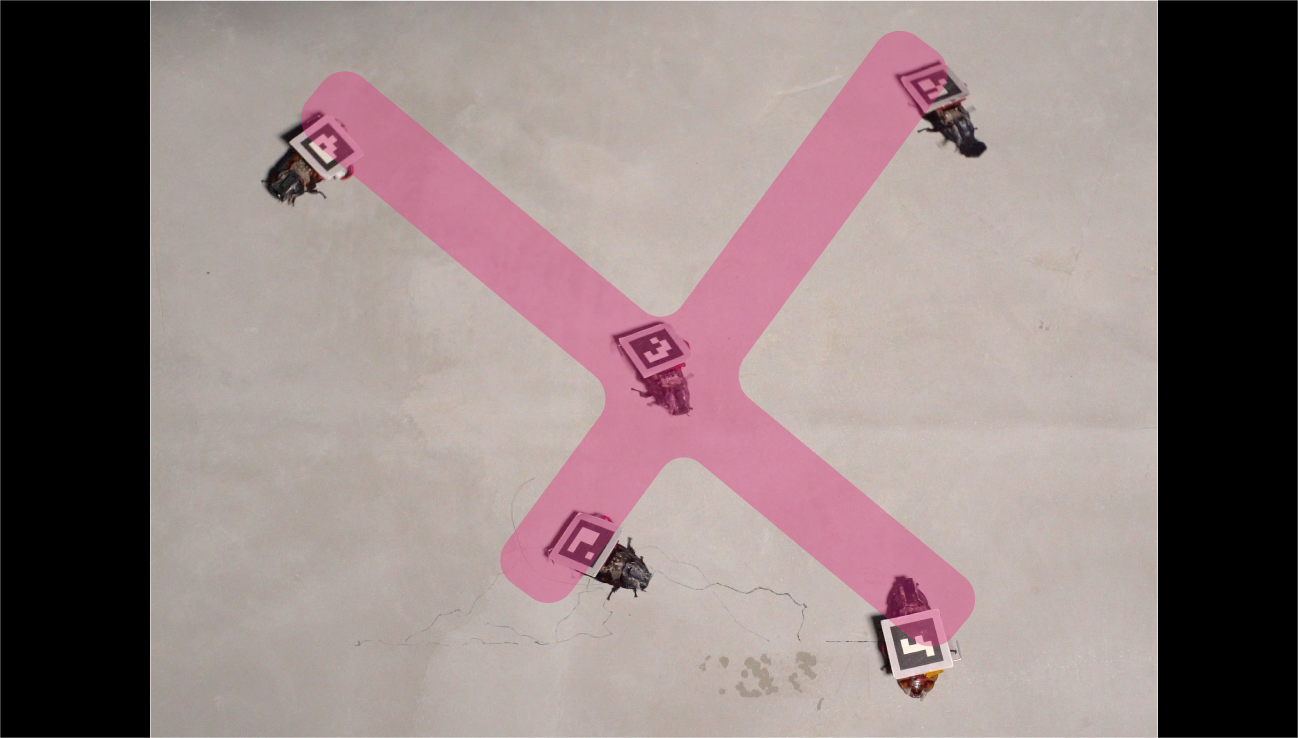
我々の技術には三つの新規性があります。一つ目は、ゴキブリを制御することで、一般的なロボットが持ち得ない、壁やカーペット、ケーブルのある床での移動などの高いモビリティ性を獲得したことです。二つ目は、オプションパーツを付与することによって、線を描写したり、物体を運搬したりすることを可能にしたことです。三つ目は、複数匹のゴキブリを同時制御するために、実際に群れをなす生物であるアリに見られる「働きアリの法則」を模倣したアルゴリズムを開発したことです。制御不能な個体が現れた時に補欠の個体がタスクを引き継ぐことでタスクの達成率を高めています。
ゴキブリは我々の生活空間に入り込み、我々からは見えないところで生活しています。しかし、彼らが存在することを我々はしばしば認識します。これは、我々が「ユビキタスコンピューティング」と呼ぶ概念の性質と似ています。「意識的ではないが、確かに存在し、ときに現れる機能」とも言えるからです。彼らをコントロール下に置くことで、彼らはグリム童話の「小人の靴屋」のように、我々の目に触れずにゴミを片付けたり、物の位置を直してくれたりします。仕事が終わると彼らは勝手に見えないところに隠れ彼らの生活に戻ります。彼らをユビキタスコンピューティング上のロボティクスと考えることは、ユビキタスなテクノロジーを考える上で十分な示唆を与えてくれるでしょう。
我々の技術には三つの新規性があります。一つ目は、ゴキブリを制御することで、一般的なロボットが持ち得ない、壁やカーペット、ケーブルのある床での移動などの高いモビリティ性を獲得したことです。二つ目は、オプションパーツを付与することによって、線を描写したり、物体を運搬したりすることを可能にしたことです。三つ目は、複数匹のゴキブリを同時制御するために、実際に群れをなす生物であるアリに見られる「働きアリの法則」を模倣したアルゴリズムを開発したことです。制御不能な個体が現れた時に補欠の個体がタスクを引き継ぐことでタスクの達成率を高めています。