技術内容
HangerONは、針金ハンガーを頭に被ると意図せず頭が回ってしまうハンガー反射と呼ばれる触覚錯覚現象を腰に対して応用し、ユーザの身体方向を変化させ歩行を操作するシステムです。フレームの内側に配置した4つの空気駆動バルーンを用いてユーザの腰部に特定の組み合わせで圧迫と皮膚変形を提示することで、小型・軽量な機構でハンガー反射を再現・制御し、ユーザの身体方向を変化させることができます。
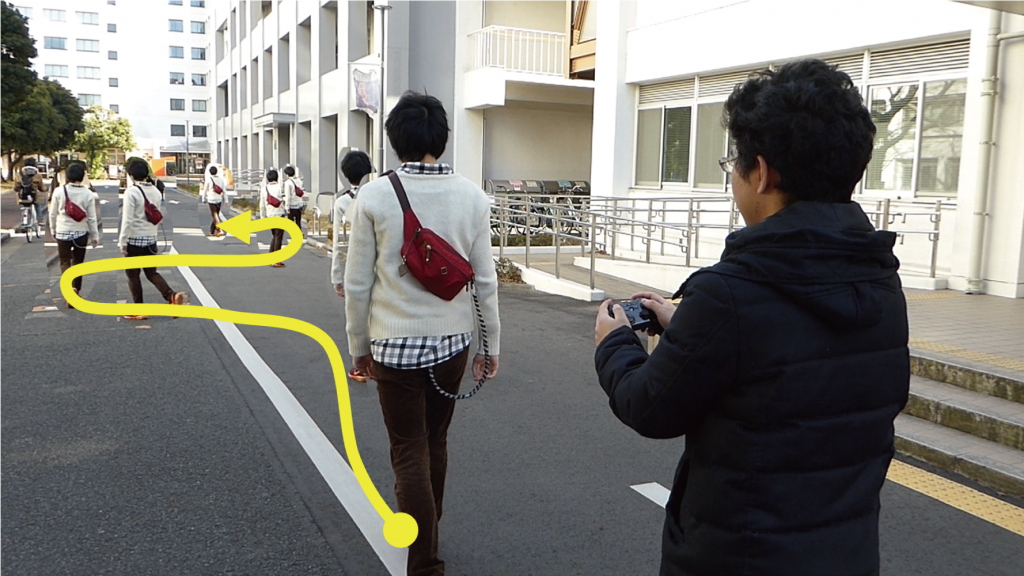
スマートフォンと組み合わせ、3種類の操作者「システム」「他者」「自己」を設定し、3種類の人間の身体拡張として のアプリケーション「自動運転」「遠隔歩行操作」「身体駆動補助」のプロトタイプを開発しました。将来的には、「歩行ナビゲーション」「遠隔就労」「運動性疾患の歩行支援」等への応用を目指しています。
動画はこちら
展示内容
HangerONは、針金ハンガーを頭に被ると意図せず頭が回ってしまうハンガー反射と呼ばれる触覚錯覚現象を腰に対して応用し、ユーザの身体方向を変化させ歩行を操作するシステムです。3種類の操作者「システム」「他者」「自己」を設定し、身体拡張アプリケーション「自動運転」「遠隔歩行操作」「身体駆動補助」のプロトタイプシステムを開発しました。今回は、「遠隔歩行操作」「身体駆動補助」の展示を行います。