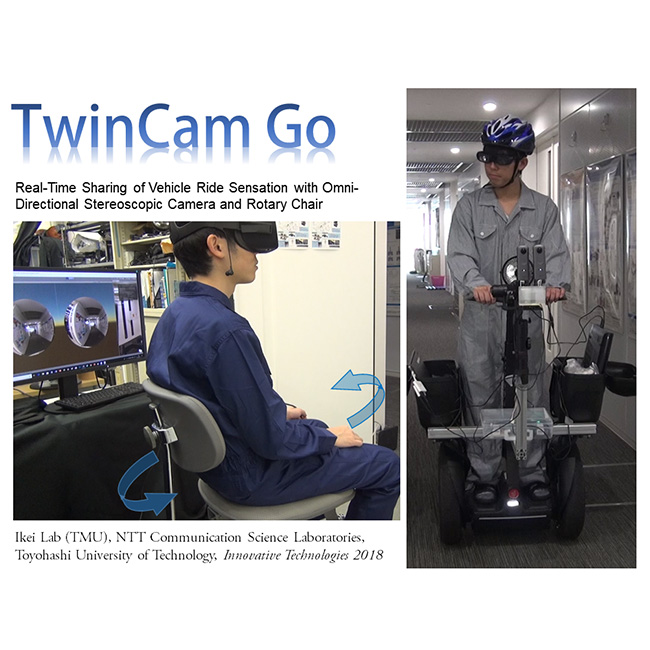
技術内容
乗り物に同乗している視覚的体験を遠隔でリアルタイムに共有するには次の困難な問題があります。動いている移動機にカメラがつけられているので、通常では映像がぼける、画面が振動する、全方位の立体視ができない、また映像通信の遅延があるなどです。これらの問題を解決するために、我々は全天球のカメラ(THETA V)を2台用いたリアルタイム全天球立体視カメラヘッド(TwinCam)を開発し、それをスタビライザを介して移動機(Segway)に搭載した同乗感覚共有システムを構築しました。このTwinCamは、全方位の映像を用いることで、見かけの映像遅延を最小化すると同時に、視差が必要な方向にカメラを回転する時に光軸がほぼ一定のため運動ぼけが起こらないという特長があります。さらに観察するユーザに移動機の回転運動の感覚を伝えるために座席を回転する機構を導入し、路面からの振動を提示するなど身体感覚との矛盾を低減するように致しました。
展示内容
走行するセグウェイに搭載したカメラからの立体映像を全方位で視認でき、かつ着座した回転椅子にはセグウェイの方向や走行路面の変化等が反映される身体的フィードバックがあります。カメラは、2台の全天球レンズを人間の目の位置に対応するように配置したもので、観察者の頭部回転に追従することで全方向に対して正しい両眼視差が与えられます。これにより、あたかもセグウェイに搭乗している感覚を得ることができます。
講評
まず、360°立体視映像の取得にかかる制御が秀逸であり、これに運動刺激を加えることで身体性が向上されている。人間の感覚特性の点からも合理的で、簡便なシステム構成であることも評価できる。