Technical details
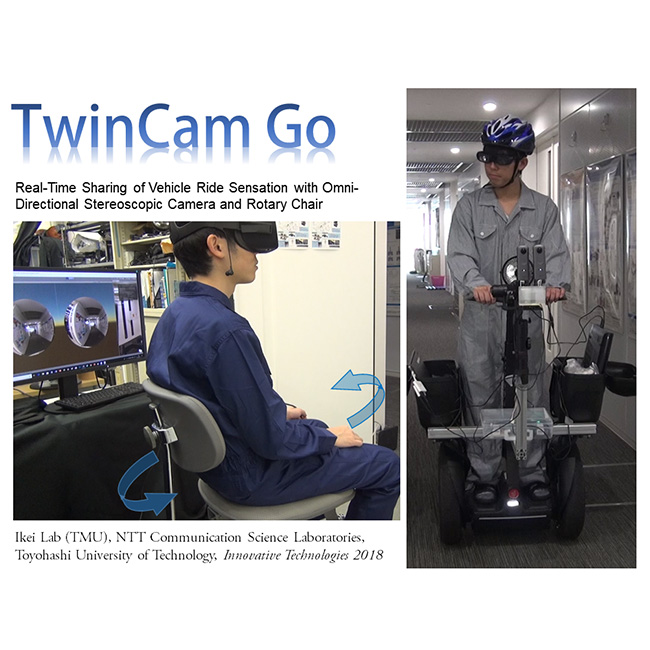
Real-time sharing of vehicle ride sensation remotely is still a challenge because of the motion blur, the latency of image transmission, and the high amplitude of image vibration that occur when the camera is attached to a running vehicle. To overcome these issues, we developed a ride-sensation sharing system providing a live stereoscopic omnidirectional view from two 360° cameras (THETA V) attached to the vehicle (Segway) via a stabilizer. Our previous study confirmed that the camera head (TwinCam) could transmit stereoscopic 3D images with minimized apparent latency by the buffered image and with reduced motion blur. Moreover, to share a kinesthetic sensation of vehicle motion with the user to reduce inconsistency of bodily sensation, we installed chair rotation and vibration mechanism synchronous with the vehicle motion.
Exhibition content
Live stereoscopic images from distant cameras mounted on a running Segway can be viewed in all directions. Physical feedback that reflects the direction of the Segway and changes in the road surface is provided through the seated rotary chair. Correct binocular disparity is given to all directions by our camera system that follows the head rotation of the observer. The sensation of share ride on the Segway is delivered to the user.