본 기술은 정보를 중첩시킨 영상을 가지고 로봇군단을 통제하고 변화시키며 콘텐츠 표현을 실현하는 기술로, 공간분할형 가시광통신(PVLC)을 사용해서 영상에 중첩된 정보에 따른 로봇의 자기위치 추정과 제어를 실시한다. 본 기술의 특징은 가시영상에 불가시(不可視)정보를 중첩시켜 투영하기 때문에, 번잡한 위치조정이나 교정이 필요하지 않고, 마카표시 등으로 영상표현을 방해하지 않는다는 점이다. 또한, 로봇을 손으로 치우거나 로봇이 장애물을 밀어젖히는 행위를 해도, 로봇이 투영공간내에 있는 한 안정된 시스템의 제어하에 두는 것이 가능하다. 그리고, 영상에 중첩된 정보에 따라 동시나열적으로 송신을 하기 때문에 대량의 로봇을 대상으로 하여도 송신자측의 시스템 부하는 발생하지 않는다. 우리는 본 기술을 통해, 「Physical」한 로봇과 「Digital」한 영상이 매끄럽게 통합된 복합 실현감 시스템을 구현하고, 이를 바탕으로 영상만이 아니라 동기화된 로봇의 동작까지 포함한 콘텐츠 표현의 디자인도 가능하게 되었다.
동영상 【전시내용】
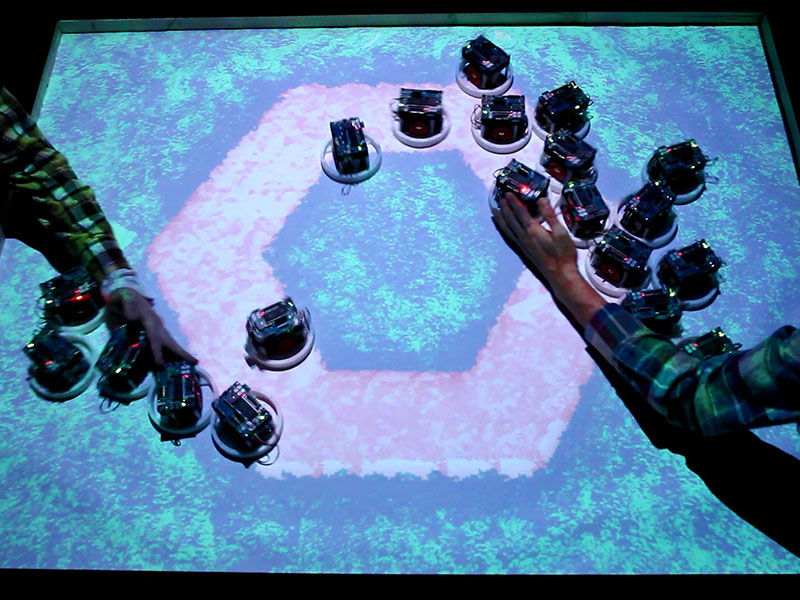
Phygital Field는 「Physical」한 로봇군단과 「Digital」한 영상이 융합된 콘텐츠를 표현하는 시스템입니다. 프로젝터에서 투영되는 영상전체에 포함되는 위치정보로 로봇을 제어하고 있어, 사람이 로봇의 움직임을 방해해도 금방 본래의 상태로 돌아갑니다. 영상공간 중에서 로봇군단이 시간/공간적으로 동기화되어 동작하는 세계를 꼭 체험해 보세요!