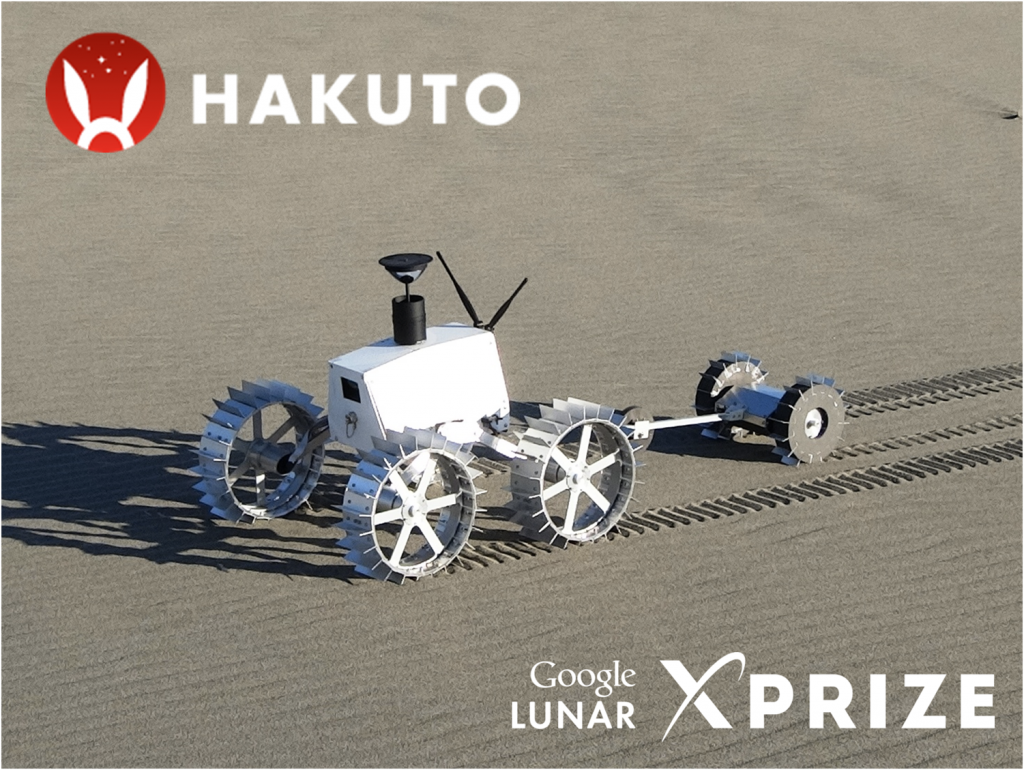
今、アメリカを中心に宇宙産業は大きな変革期を迎えている。従来の政府による重厚長大な宇宙開発から、民間による機動的な宇宙開発が成長しつつあり、アメリカ政府もその流れを歓迎し支援し始めている。ハクトでは、民間によるロボット月面探査を実現するために、民生品を活用した超小型探査ローバーを開発している。開発している東北大学吉田和哉教授はこれまでに、小惑星探査機はやぶさの開発に携わり、研究室で民生品を活用した超小型衛星開発、人間が立ち入らないような場所で機能する不整地走行ロボットなどを開発してきており、今回の超小型探査ローバーは吉田教授のいままでの研究成果を活かしている。宇宙開発では重量が大きいほど打上費などのミッションコストが高くなる。コストを下げるために、政府だと数百kgになるローバーを、最小1kg台の対向2輪ローバーや10kg弱の4輪ローバーなど軽量小型ローバーを開発している。ホイールは月面の軟弱地でもスリップせずに走行するために、車輪径やグラウザーの工夫がある。放射線耐用のある民生品を選び出し、高性能かつ小型化、低コスト化に成功している。
動画はこちら